Some how I didn’t get the memo that I needed to calibrate my Polulu’s on my ramps 1.4. As this is my first 3d printer that I’m working on, I can and do forgive myself 😉 . So this is my research notes page on figuring on how to do that. In addition, when check my extruder surface temp with my harbor freight laser gauge, I’m checking low, which seems to validated by the high temperatures I need to run at…. (I was toying with the idea of hacking the gauge to read the temperature and then creating an app that would automatically generate the temperature curve… I’m thinking that’s probably been done already if I google enough.) (Hm… one part of the solution is here: http://endless-sphere.com/forums/viewtopic.php?f=7&t=49058
My main drive motor are from Kysan www.kysanelectronics.com Pn 1124090 and here is the Spec sheet http://www.kysanelectronics.com/graphics/1124090-1.pdf 4.2 V Rated at 1.5 Amp/Phase.
My extruder stepper motor is a Wantai Model 42BYGH610 Rated at 1.2 amps 1.8 Degrees pre stephttp://www.wantmotor.com/ProductsView.asp?id=156&pid=80
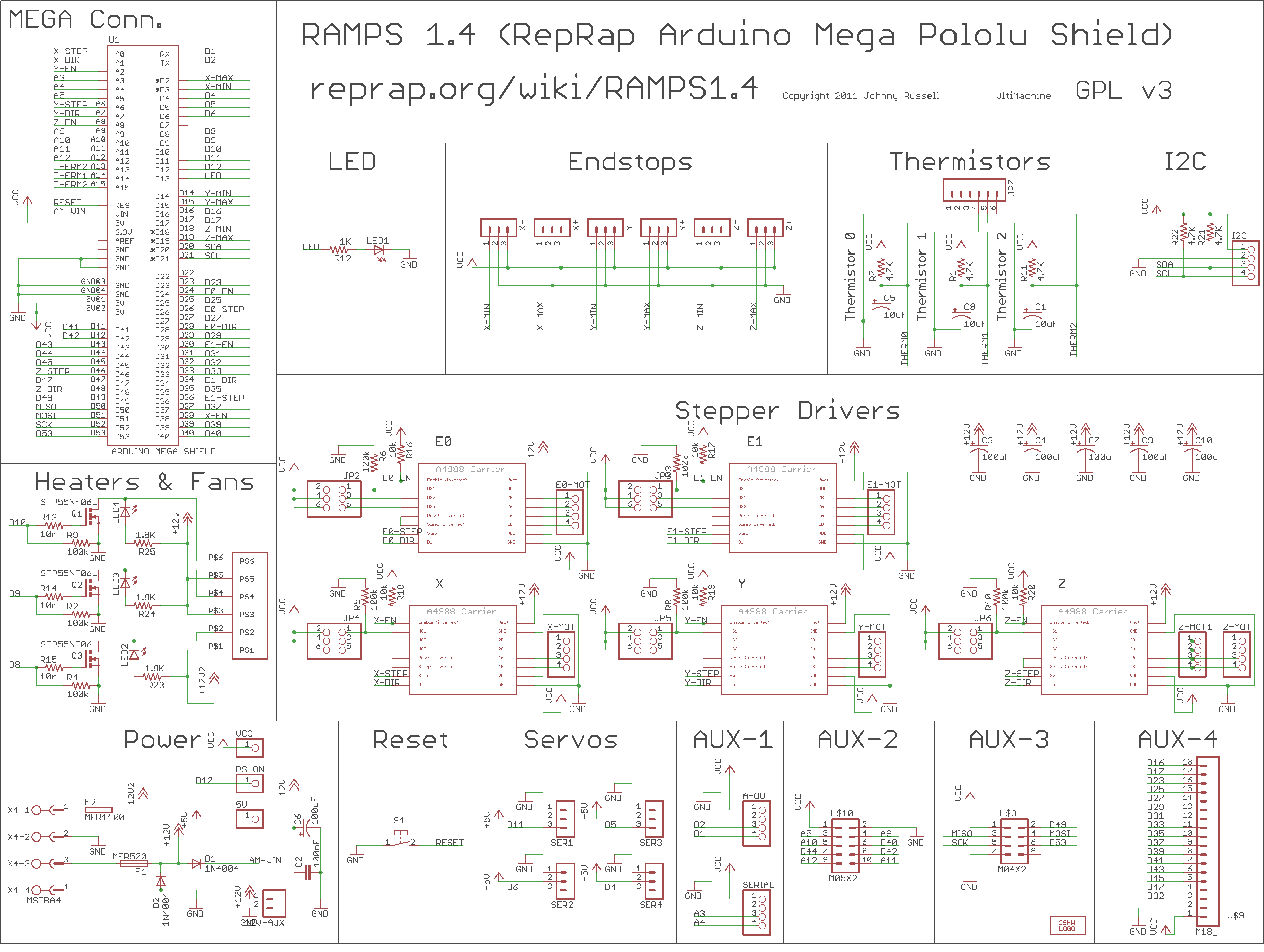
Looking at http://reprap.org/wiki/RAMPS turning the pot CCW lowers the current, CW increased the current. Not enough the motor wont turn, Too much the magic smoke gets let out….. That’s good to know.
Soo.. I’m looking at this post http://forum.pololu.com/viewtopic.php?t=34 and it talks about calibrating the polulo outside on a breadboard and directly measuring the coil amperage setting it at 70% of the rated amperage.. The thing is I need did up a few capacitor and setup a breadboard or by his board for 35 bucks.. Ok… I want to avoid that if I can.
This seems worth looling at. http://reprap.org/wiki/Calibration
Instructions
Each Pololu has a trimpot located next to the heatsink. The trimpot controls the current that is sent to each motor. Turning the trimpot counter-clockwise reduces the current to the motor, turning it clockwise increases the current to the motor.
Start by adjusting the trimpot down until your motor vibrates on the spot rather than turning cleanly. Now turn the trimpot in a clockwise direction in small increments (1 eighth of a turn) until the motors just start running. Then give the trim port a final turn of about 1 eighth of a turn and your should be good to go.
http://forums.reprap.org/read.php?147,111807,112200
Ok… 1/16 stepping on the motor is NG… try 1/8 http://reprap.org/wiki/RAMPS_1.4#Stepper_Driver_Boards
But back to motor calibration for the moment.
Ok.. Out of google groups I found this link on issues with microstepping: http://www.micromo.com/microstepping-myths-and-realities.aspx
So, I heated up the extruder to where I could push the plastic through the nozzle manually and then I trimmed back the Polulu pot and tried the calibration procedure…
It turned it up and it seemed like I couldn’t get the hobbed gear I made to spin. I basically had the pot turned up all the way and no joy.
I wound up tearing the extruder apart. The set screw was loose. I think the hex in the setscrew was stripped and I never tighened it enough. It looks like there was alot of spinning on the shaft. So I put a setscrew on and really tightened it. I then tried to set the current on the motor. This is where things seem to be getting weird.. I could get the motor to buzz when I turn the potentiometer but I couldn’t get it to go. When I manually turned the motor it started turning a bit and then stopped.
I’m thinking its one or more of the following:
Something hosed up on the motor, coils damaged or their not connected correctly.
Something is messed up on the harness wiring.
Something messed up on the Polulu.
At the moment, I visiting Mom for her day… so I can test this out. I’m thinking the easiest test is to plug in the x-axis motor into the extruder Polulu and see what happens..


{kind=link}
{kind=link}